
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |||
| 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| 12 | 13 | 14 | 15 | 16 | 17 | 18 |
| 19 | 20 | 21 | 22 | 23 | 24 | 25 |
| 26 | 27 | 28 | 29 | 30 | 31 |
- 인공지능
- 편미분
- 순차 자료구조
- 회귀분석
- 딥러닝 교차엔트로피
- 교차 엔트로피
- 자료구조 알고리즘
- DB
- 확률분포
- 딥러닝 교차 엔트로피
- lost function
- 신경망
- 뇌를 자극하는 알고리즘
- DBMS
- 자연어처리
- 퍼셉트론
- 연결 자료구조
- 단층 퍼셉트론
- 리스트
- 오퍼랜드
- 자료구조
- 파이썬 딥러닝
- 엔트로피
- 파라미터
- 파이썬 날코딩으로 알고 짜는 딥러닝
- 단층퍼셉트론
- 딥러닝
- 컴퓨터구조
- 노드
- 선형 리스트
- Today
- Total
YZ ZONE
[ 컴퓨터구조 ] 4.5 마이크로프로그램의 순서 제어 본문
마이크로프로그램의 순서 제어
▣ 명령어 실행 제어
▪ 제어 유니트가 명령어의 실행을 제어한다는 것은
▪ 제어 기억장치에 저장된 해당 마이크로명령어들을 순서대로 인출하는동작이라고 할 수 있음
▪ 즉, 각 마이크로명령어를 읽어서 연산 필드에 있는 비트들을 출력시키 면, 그 비트들 자체가 제어 신호들이 됨
▣ 순서 제어 (sequencing)
▪ 다음에 실행할 마이크로명령어의 주소를 결정하는 기능
▣ CAR
▪ 다음에 인출할 마이크로명령어의 제어 기억장치 주소를 가지고 있음
▪ CPU가 처음 동작을 시작하는 순간 ➢ CAR = 0
➢인출 사이클 루틴의 첫 번째 마이크로명령어를 인출하면서 마이크로프로그램 실행이 시작됨
▣ MUX1
▪ 다음에 실행할 마이크로명령어의 주소 선택
▣ MUX2
▪ 조건 플래그를 선택하여 주소선택 회로로 전송
순서제어 회로가 포함된 제어 유니트의 구성도

주소 선택 회로의 입력 및 출력 신호들
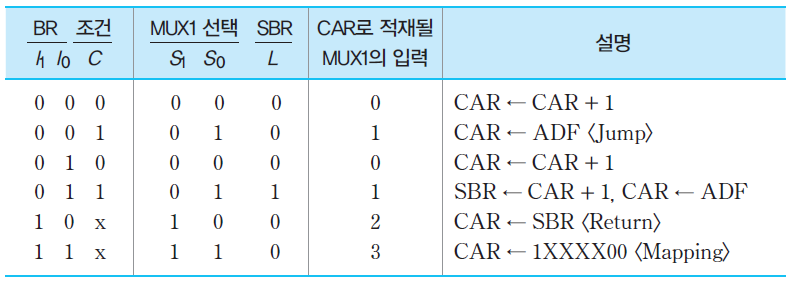
주소 선택 방법
▣ 주소 선택 방법
▪ BR = 00 (JUMP) 혹은 01 (CALL)일 때,
C = 0, 다음 위치의 마이크로명령어 선택
C = 1, 주소 필드(ADF)가 지정하는 위치로 점프(jump) 혹은 호출(call) (단, 호출 시에는 CAR 내용을 SBR에 저장)
▪ BR = 10 (RET)일 때는 SBR 내용을 CAR로 적재 : 복귀
▪BR = 11 (MAP)일 때는 사상 결과를 CAR에 적재
제어 신호의 생성
▣ 제어 기억장치로부터 인출된 마이크로명령어 내 연산 필드 의 비트들이 제어 유니트의 외부로 출력되어, 각각 제어 신호 로 사용됨
▣ 출력되는 비트들이 각각 하나의 제어 신호로 사용된다면, 연 산 필드들에 해당하는 제어 신호들만 발생할 수 있음
▪ 제어 신호 부족 현상 초래
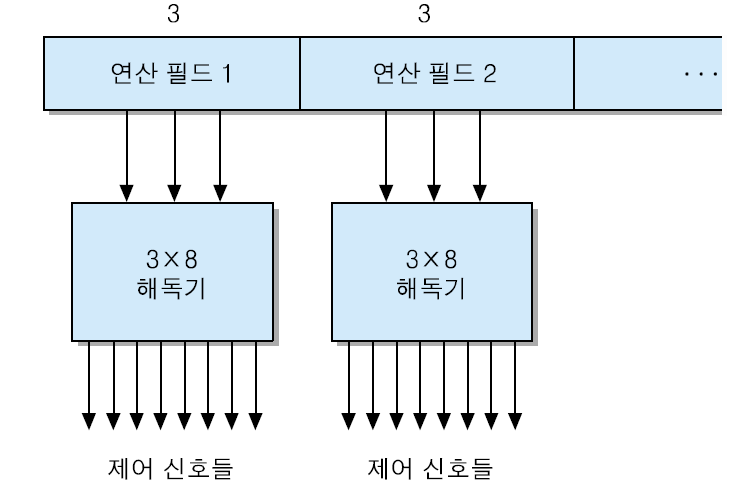
(1) 수직적 마이크로 프로그래밍
▣ Vertical microprogramming
▣ 마이크로명령어의 연산 필드에 적은 수의 코드화된 비트들 (encoded bits)을 포함시키고, 해독기를 이용하여 그 비트들 을 필요한 수 만큼의 제어 신호들로 확장하는 방식
[장점] 마이크로명령어의 길이(비트 수) 최소화 →제어 기억장치 용량 감소
[단점] 해독 동작에 걸리는 만큼의 지연 시간 발생
수직적 마이크로프로그래밍에서의 제어 신호 발생 방법
(2) 수평적 마이크로 프로그래밍
▣ Horizontal microprogramming
▣ 연산 필드의 각 비트와 제어 신호를 1:1로 대응시키는 방식
▣ 필요한 제어 신호 수만큼의 비트들로 이루어진 연산필드 비 트들이 마이크로명령어에 포함되어야 함
[장점] 하드웨어가 간단하고, 해독에 따른 지연 시간이 없음
[단점] 마이크로명령어의 비트 수가 길어지기 때문에 제어 기억 장치의 용량이 증가
'IT > 컴퓨터구조' 카테고리의 다른 글
| [ 컴퓨터구조 ] 5.2 계층적 기억장치시스템 (0) | 2023.02.06 |
|---|---|
| [ 컴퓨터구조 ] 5.1 기억장치의 분류와 특성 (0) | 2023.02.06 |
| [ 컴퓨터구조 ] 4.4 마이크로프로그래밍 (0) | 2023.02.06 |
| [ 컴퓨터구조 ] 4.3 마이크로 명령어의 형식 (0) | 2023.02.06 |
| [ 컴퓨터구조 ] 4.1-2 제어 유니트의 기능/ 구조 (0) | 2023.02.06 |


